Difference between revisions of "Magnetfeld und Beschleunigung"
| Line 10: | Line 10: | ||
https://phyphox.org/wiki/index.php/Drehrate_und_Beschleunigung . | https://phyphox.org/wiki/index.php/Drehrate_und_Beschleunigung . | ||
| − | + | Für die genaue Beschreibung wird also auf die oberen beiden Links verwiesen. Zu erwähnen ist aber Folgendes: | |
| − | + | ||
| + | Obwohl der Drehratensensor die Werte in Winkelgrad pro Sekunde ausgeben sollte, musste ein Korrekturfaktor ins Programm, um vernünftige Messwerte zu bekommen. | ||
| + | In den drei Views wären mehr Datenkanäle wünschenswert gewesen. Die Bibliothek erlaubt aber maximal fünf. | ||
<gallery widths=500px heights=300px> | <gallery widths=500px heights=300px> | ||
| Line 24: | Line 26: | ||
==Aufbau== | ==Aufbau== | ||
| − | + | siehe | |
| − | + | https://phyphox.org/wiki/index.php/Externer_Magnetfeldsensor | |
| − | |||
| − | |||
| − | |||
| − | |||
| − | + | https://phyphox.org/wiki/index.php/Drehrate_und_Beschleunigung . | |
| − | + | Der Signal-Pin des Hall-Sensors ist an den Arduino-Pin A6 gelötet. | |
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
==Programmierung== | ==Programmierung== | ||
| − | Der | + | Der Arduino Nano 33 BLE wird über die Arduino IDE programmiert. Es müssen die Definitionen für den Nano 33 BLE und die phyphox-Bibliothek installiert sein. Siehe dazu das Video unter [[:Category: Arduino library experiments]]. |
| − | Es ist darauf zu achten, dass jeder | + | Es ist darauf zu achten, dass jeder Nao eine eigene Kennung hat (diese wird in ''PhyphoxBLE::start("Nano33_Multi_1")'' festgelegt). Anschließend kann über das Plus-Symbol in phyphox ein Bluetooth-Experiment hinzugefügt werden, das Experiment wird dann automatisch geladen. |
<pre> | <pre> | ||
| + | #include <Arduino_LSM9DS1.h> | ||
#include <phyphoxBle.h> | #include <phyphoxBle.h> | ||
| − | int AnalogPin= | + | int AnalogPin=A6; //Pin Hall-Sensor |
| − | float Messwert; | + | float Messwert,x ,y ,z, OffsetX, OffsetY, OffsetZ, wx, wy, wz; |
| − | float Magnetfeld; | + | float Magnetfeld, Beschleunigung, Drehrate; |
float Offset; | float Offset; | ||
void setup() { | void setup() { | ||
| − | PhyphoxBLE::start(" | + | PhyphoxBLE::start("Nano33_Multi_1"); |
//Experiment | //Experiment | ||
PhyphoxBleExperiment experiment; | PhyphoxBleExperiment experiment; | ||
| − | experiment.setTitle(" | + | experiment.setTitle("Nano33_Multi1_B"); |
experiment.setCategory("Arduino Experiments"); | experiment.setCategory("Arduino Experiments"); | ||
| − | experiment.setDescription(" | + | experiment.setDescription("Magnetfeld, Beschleunigung, Gyro"); |
| − | + | ||
| − | PhyphoxBleExperiment::View | + | PhyphoxBleExperiment::View view1; |
| + | view1.setLabel("Magnetfeld"); | ||
| + | PhyphoxBleExperiment::View view2; | ||
| + | view2.setLabel("Beschleunigung"); | ||
| + | PhyphoxBleExperiment::View view3; | ||
| + | view3.setLabel("a von omega"); | ||
//Value | //Value | ||
PhyphoxBleExperiment::Value Value1; | PhyphoxBleExperiment::Value Value1; | ||
| Line 66: | Line 64: | ||
Value1.setUnit("mT"); | Value1.setUnit("mT"); | ||
Value1.setChannel(1); | Value1.setChannel(1); | ||
| − | // | + | //Graphen |
| − | PhyphoxBleExperiment::Graph | + | PhyphoxBleExperiment::Graph graph1; //B |
| − | + | graph1.setLabel("B - Offset"); | |
| − | + | graph1.setUnitX("s"); | |
| − | + | graph1.setUnitY("mT"); | |
| − | + | graph1.setLabelX("time"); | |
| − | + | graph1.setLabelY("B"); | |
| − | + | graph1.setChannel(0,1); | |
| − | + | PhyphoxBleExperiment::Graph graph2; //ax | |
| − | + | graph2.setLabel("ax"); | |
| − | experiment.addView( | + | graph2.setUnitX("s"); |
| + | graph2.setUnitY("g"); | ||
| + | graph2.setLabelX("time"); | ||
| + | graph2.setLabelY("ax"); | ||
| + | graph2.setChannel(0,2); | ||
| + | PhyphoxBleExperiment::Graph graph3; //ay | ||
| + | graph3.setLabel("az"); | ||
| + | graph3.setUnitX("s"); | ||
| + | graph3.setUnitY("g"); | ||
| + | graph3.setLabelX("time"); | ||
| + | graph3.setLabelY("az"); | ||
| + | graph3.setChannel(0,3); | ||
| + | PhyphoxBleExperiment::Graph graph4; //az | ||
| + | graph4.setLabel("|a_res| aus ax und ay - Offset"); | ||
| + | graph4.setUnitX("s"); | ||
| + | graph4.setUnitY("m/s2"); | ||
| + | graph4.setLabelX("time"); | ||
| + | graph4.setLabelY("axy"); | ||
| + | graph4.setChannel(0,4); | ||
| + | PhyphoxBleExperiment::Graph graph5; //axy von omega_res | ||
| + | graph5.setLabel("|a_res| von omega_res"); | ||
| + | graph5.setLabelX("axy"); | ||
| + | graph5.setUnitX("1/s"); | ||
| + | graph5.setUnitY("m/s2"); | ||
| + | graph5.setLabelX("omega_xyz"); | ||
| + | graph5.setLabelY("axy"); | ||
| + | graph5.setStyle("dots"); | ||
| + | graph5.setChannel(5, 4); | ||
| + | |||
| + | PhyphoxBleExperiment::Graph graph6; | ||
| + | graph6.setLabel("Res. Drehrate"); | ||
| + | graph6.setLabelX("omega_xyz"); | ||
| + | graph6.setUnitX("s"); | ||
| + | graph6.setUnitY("1/s"); | ||
| + | graph6.setLabelX("time"); | ||
| + | graph6.setLabelY("omega_xyz"); | ||
| + | graph6.setChannel(0, 5); | ||
| + | |||
| + | view1.addElement(graph1); | ||
| + | view1.addElement(Value1); | ||
| + | view2.addElement(graph2); | ||
| + | view2.addElement(graph3); | ||
| + | view2.addElement(graph4); | ||
| + | view3.addElement(graph5); | ||
| + | view3.addElement(graph6); | ||
| + | view3.addElement(graph4); | ||
| + | experiment.addView(view1); | ||
| + | experiment.addView(view2); | ||
| + | experiment.addView(view3); | ||
PhyphoxBLE::addExperiment(experiment); | PhyphoxBLE::addExperiment(experiment); | ||
| − | //Offsetkorrektur | + | |
| + | //Offsetkorrektur Magnetfeld | ||
Offset=0; | Offset=0; | ||
for(int i=0;i<100;i++){ | for(int i=0;i<100;i++){ | ||
| Line 85: | Line 132: | ||
} | } | ||
Offset=Offset/100; | Offset=Offset/100; | ||
| + | |||
| + | IMU.begin(); //Beschleunigungssensor starten | ||
| + | // Offsetkorrektur Beschleunigung | ||
| + | for(int i=0;i<100;i++){ | ||
| + | IMU.readAcceleration(x, y, z); | ||
| + | OffsetX += x; | ||
| + | OffsetY += y; | ||
| + | OffsetZ += z; | ||
| + | delay(10); | ||
| + | } | ||
| + | OffsetX=OffsetX/100; | ||
| + | OffsetY=OffsetY/100; | ||
| + | OffsetZ=OffsetZ/100; | ||
| + | |||
Serial.begin(38400); | Serial.begin(38400); | ||
} | } | ||
void loop() { | void loop() { | ||
| − | Messwert=0; | + | IMU.readAcceleration(x, y, z); |
| + | Beschleunigung = 9.81 * sqrt(sq(x - OffsetX) + sq(y - OffsetY)); | ||
| + | IMU.readGyroscope(wx, wy, wz); | ||
| + | Drehrate = 1.1148*6.28318530718*(sqrt(sq(wx) + sq(wy) + sq(wz))) / 360; //Kalibrierung Plattenspieler | ||
| + | Messwert=0;//Magnetfeld mitteln | ||
for(int i=0;i<7;i++){ | for(int i=0;i<7;i++){ | ||
Messwert+=analogRead(AnalogPin); | Messwert+=analogRead(AnalogPin); | ||
| Line 94: | Line 159: | ||
} | } | ||
Messwert=Messwert/7; | Messwert=Messwert/7; | ||
| − | Magnetfeld=(Messwert-Offset)*(-0.0492); //Kalibrierung überprüfen | + | Magnetfeld=(Messwert-Offset)*(-0.0492)*40/9; //Kalibrierung überprüfen |
| − | PhyphoxBLE::write(Magnetfeld); | + | PhyphoxBLE::write(Magnetfeld,x ,z, Beschleunigung, Drehrate); //leider nur 5 channels |
Serial.println(Magnetfeld); | Serial.println(Magnetfeld); | ||
| − | delay( | + | delay(10); |
} | } | ||
</pre> | </pre> | ||
Revision as of 16:18, 13 November 2023
| Experiment | Magnetfeld und Beschleunigung |
|---|---|
| Category | Arduino library experiments |
| Used sensors | 49e, Arduino Nano 33 BLE (IMU) |
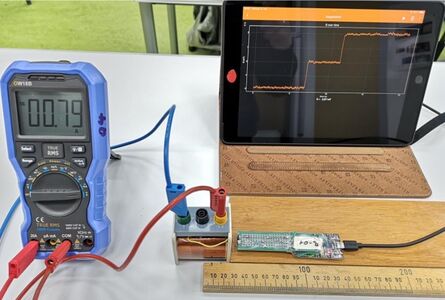
Der Arduino Nano 33 BLE verfügt über einen internen Beschleunigungs- und Drehratensensor. Außerdem ist er schlank genug, mit direkt aufgelötetem Hall-Sensor in spulen eingeführt zu werden. Somit lässt sich ein kleines, kompaktes Multi-Sensormodul daraus bauen, also eine Kombination aus
https://phyphox.org/wiki/index.php/Externer_Magnetfeldsensor
https://phyphox.org/wiki/index.php/Drehrate_und_Beschleunigung .
Für die genaue Beschreibung wird also auf die oberen beiden Links verwiesen. Zu erwähnen ist aber Folgendes:
Obwohl der Drehratensensor die Werte in Winkelgrad pro Sekunde ausgeben sollte, musste ein Korrekturfaktor ins Programm, um vernünftige Messwerte zu bekommen. In den drei Views wären mehr Datenkanäle wünschenswert gewesen. Die Bibliothek erlaubt aber maximal fünf.
Aufbau
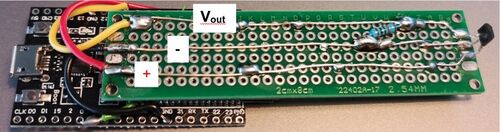
Sensor


Das grüne Kabel unten im Bild ist ein Relikt eines anderen Versuchs und hat hier keine Bewandtnis. Die Platine kann man mit dickem (Kurzschlussgefahr!) dppelseitigen Klebeband aufs ESP-Board kleben. Als Packaging hat sich transparenter Schumpfschlauch bewährt.
Aufbau
siehe https://phyphox.org/wiki/index.php/Externer_Magnetfeldsensor
https://phyphox.org/wiki/index.php/Drehrate_und_Beschleunigung .
Der Signal-Pin des Hall-Sensors ist an den Arduino-Pin A6 gelötet.
Programmierung
Der Arduino Nano 33 BLE wird über die Arduino IDE programmiert. Es müssen die Definitionen für den Nano 33 BLE und die phyphox-Bibliothek installiert sein. Siehe dazu das Video unter Category: Arduino library experiments.
Es ist darauf zu achten, dass jeder Nao eine eigene Kennung hat (diese wird in PhyphoxBLE::start("Nano33_Multi_1") festgelegt). Anschließend kann über das Plus-Symbol in phyphox ein Bluetooth-Experiment hinzugefügt werden, das Experiment wird dann automatisch geladen.
#include <Arduino_LSM9DS1.h>
#include <phyphoxBle.h>
int AnalogPin=A6; //Pin Hall-Sensor
float Messwert,x ,y ,z, OffsetX, OffsetY, OffsetZ, wx, wy, wz;
float Magnetfeld, Beschleunigung, Drehrate;
float Offset;
void setup() {
PhyphoxBLE::start("Nano33_Multi_1");
//Experiment
PhyphoxBleExperiment experiment;
experiment.setTitle("Nano33_Multi1_B");
experiment.setCategory("Arduino Experiments");
experiment.setDescription("Magnetfeld, Beschleunigung, Gyro");
PhyphoxBleExperiment::View view1;
view1.setLabel("Magnetfeld");
PhyphoxBleExperiment::View view2;
view2.setLabel("Beschleunigung");
PhyphoxBleExperiment::View view3;
view3.setLabel("a von omega");
//Value
PhyphoxBleExperiment::Value Value1;
Value1.setLabel("B = ");
Value1.setUnit("mT");
Value1.setChannel(1);
//Graphen
PhyphoxBleExperiment::Graph graph1; //B
graph1.setLabel("B - Offset");
graph1.setUnitX("s");
graph1.setUnitY("mT");
graph1.setLabelX("time");
graph1.setLabelY("B");
graph1.setChannel(0,1);
PhyphoxBleExperiment::Graph graph2; //ax
graph2.setLabel("ax");
graph2.setUnitX("s");
graph2.setUnitY("g");
graph2.setLabelX("time");
graph2.setLabelY("ax");
graph2.setChannel(0,2);
PhyphoxBleExperiment::Graph graph3; //ay
graph3.setLabel("az");
graph3.setUnitX("s");
graph3.setUnitY("g");
graph3.setLabelX("time");
graph3.setLabelY("az");
graph3.setChannel(0,3);
PhyphoxBleExperiment::Graph graph4; //az
graph4.setLabel("|a_res| aus ax und ay - Offset");
graph4.setUnitX("s");
graph4.setUnitY("m/s2");
graph4.setLabelX("time");
graph4.setLabelY("axy");
graph4.setChannel(0,4);
PhyphoxBleExperiment::Graph graph5; //axy von omega_res
graph5.setLabel("|a_res| von omega_res");
graph5.setLabelX("axy");
graph5.setUnitX("1/s");
graph5.setUnitY("m/s2");
graph5.setLabelX("omega_xyz");
graph5.setLabelY("axy");
graph5.setStyle("dots");
graph5.setChannel(5, 4);
PhyphoxBleExperiment::Graph graph6;
graph6.setLabel("Res. Drehrate");
graph6.setLabelX("omega_xyz");
graph6.setUnitX("s");
graph6.setUnitY("1/s");
graph6.setLabelX("time");
graph6.setLabelY("omega_xyz");
graph6.setChannel(0, 5);
view1.addElement(graph1);
view1.addElement(Value1);
view2.addElement(graph2);
view2.addElement(graph3);
view2.addElement(graph4);
view3.addElement(graph5);
view3.addElement(graph6);
view3.addElement(graph4);
experiment.addView(view1);
experiment.addView(view2);
experiment.addView(view3);
PhyphoxBLE::addExperiment(experiment);
//Offsetkorrektur Magnetfeld
Offset=0;
for(int i=0;i<100;i++){
Offset+=analogRead(AnalogPin);
delay(10);
}
Offset=Offset/100;
IMU.begin(); //Beschleunigungssensor starten
// Offsetkorrektur Beschleunigung
for(int i=0;i<100;i++){
IMU.readAcceleration(x, y, z);
OffsetX += x;
OffsetY += y;
OffsetZ += z;
delay(10);
}
OffsetX=OffsetX/100;
OffsetY=OffsetY/100;
OffsetZ=OffsetZ/100;
Serial.begin(38400);
}
void loop() {
IMU.readAcceleration(x, y, z);
Beschleunigung = 9.81 * sqrt(sq(x - OffsetX) + sq(y - OffsetY));
IMU.readGyroscope(wx, wy, wz);
Drehrate = 1.1148*6.28318530718*(sqrt(sq(wx) + sq(wy) + sq(wz))) / 360; //Kalibrierung Plattenspieler
Messwert=0;//Magnetfeld mitteln
for(int i=0;i<7;i++){
Messwert+=analogRead(AnalogPin);
delay(10);
}
Messwert=Messwert/7;
Magnetfeld=(Messwert-Offset)*(-0.0492)*40/9; //Kalibrierung überprüfen
PhyphoxBLE::write(Magnetfeld,x ,z, Beschleunigung, Drehrate); //leider nur 5 channels
Serial.println(Magnetfeld);
delay(10);
}
Arbeitsmaterialien
Ein mögliches Schülerarbeitsblatt (aktuelle Sicherheitsrichtlinien nach RISU beachten!) Das folgende Material ist im Rahmen einer Lehrerfortbildung im Jahre 2022 in Niedersachsen entstanden. Es richtet sich an Physiklehrkräfte, also Fachleute. Jede Lehrkraft ist selbst dafür verantwortlich, die aktuell geltenden sicherheitsrichtlinien nach RISU einzuhalten und im Vorfeld selbst eine Gefährdungsbeurteilung zu schreiben. Der Autor dieses Materials übernimmt keinerlei Haftung für Schäden, die bei der Anwendung entstehen.