Luftkissenbahn und Federpendel
| Experiment | Luftkissenbahn und Federpendel |
|---|---|
| Category | Arduino library experiments |
| Used sensors | distance, acceleration |
Sowohl beim Federpendel als auch bei Versuchen auf der Luftkissenbahn, wo man Weg, Geschwindigkeit und Beschleunigung messen möchte, bietet sich eine Kombination aus Abstands- und Beschleunigungssensor an. Der Arduino Nano 33 BLE verfügt über einen eingebauten Beschleunigungssensor. Über den I2C-Bus lässt sich zusätzlich ein Time-of-Flight-Sensor anschließen, siehe https://phyphox.org/wiki/index.php/Distanzsensor_(Federpendel). So lassen sich beim Federschwinger die Elongation (millimetergenau) und die Beschleunigung des Schwingers gleichzeitig messen. Bei der Luftkissenbahn bekommt man so das Weg-Zeit und das Beschleunigung-Zeit-Diagramm parallel in Echtzeit. Die aktuelle Geschwindigkeit lässt sich über einen Differenzenquotienten aus den Wegdaten berechnen.
Unten gibt es zwei Programme. Variante 1 verzichtet auf die Geschwindigkeit, liefert dafür aber zwei Abstandsinformationen (mit und ohne Offset). Die 2. Variante berechnet die Momentangeschwindigkeit mit zentralen Differenzenquotienten aus dem Signal des ToF-Sensors. Das ist natürlich etwas rauschig, funktioniert aber gar nicht so schlecht. Einfach mal ausprobieren.
Beim Federpendel wird die Sensorbox unter den Schwinger geklettet. Der Abstand wird zum Tisch gemessen. Eine positive Beschleunigung ist hier also in die negative z-Richtung des Sensorkoordinatensystems gerichtet (siehe Vorzeichen in Programmierung). In den Rohdaten des Beschleunigungsensors ist schon eine leichte Verkippung messbar. Deshalb wird beim Einschalten oder Resetten des Sensorsormoduls die Beschleunigung auf Null tariert (Offsetmessung, siehe Programmierung). Gleiches geschieht mit dem Abstand. In zwei Views kann der Abstand nach wunsch untariert oder tariert dargestellt werden (Programmcode 1).
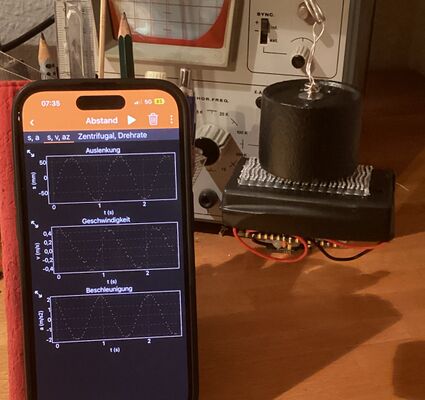
Da ein Gyroskop sowieso mit verbaut ist, lässt sich eine Messung zur Zentrifugalbeschleunigung (siehe https://phyphox.org/wiki/index.php/Drehrate_und_Beschleunigung) auch gleich noch mit in view3 interieren. So hat man insbesondere für Physik im 11. und 12. Jg. einen sehr universellen Sensor.
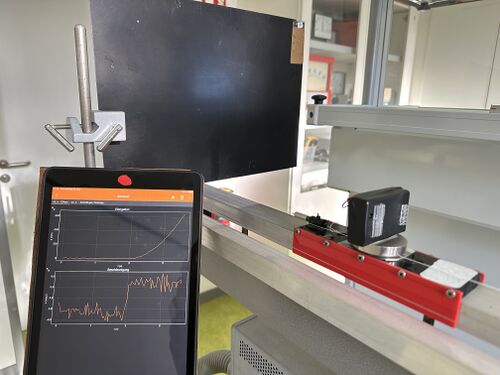
Beschleunigungs- und Abstandsmessung auf Luftkissenbahn

Arduino Nano 33 BLE mit ToF-Sensor
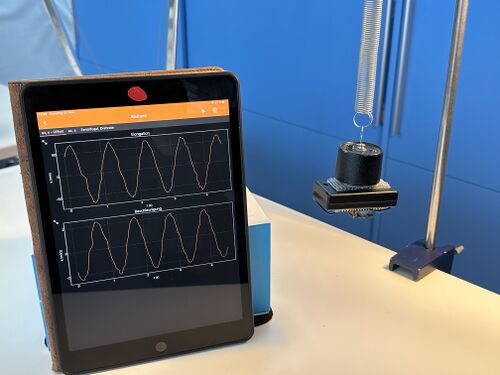
Arduino Nano 33 BLE mit ToF-Sensor unter Federpendel
Alternativer Code (s. u.) mit Geschwindigkeitsgraph über zentrale Differenzenquotienten
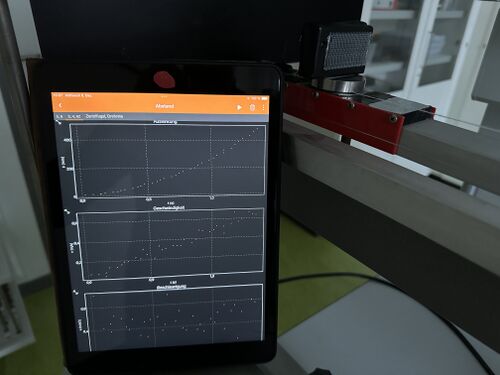
Alternativer Code (s. u.) mit Geschwindigkeitsgraph über zentrale Differenzenquotienten

Die mithilfe einer Ausgleichsgeraden ermittelte Geschwindigkeit passt perfekt zu den Werten des Beschleunigungssensors






Aufbau
Die Verkabelung des Sensors ist wieder wie üblich: 3-6V – 3V3, Gnd – Gnd, SCL – A5, SDA –A4. Als Stromversorgung dient hier ein schalbarer 4,5-V-Batteriehalter, auf den der Nano mit Pilzkopfband geklettet ist. Der ToF-Sensor wurde mit etwas Heißkleber auf den Nano neben das Kommunikationsmodul geklebt.
Programmierung
Der Arduino Nano 33 BLE wird über die Arduino IDE programmiert. Es müssen die Definitionen für den Nano und die phyphox-Bibliothek installiert sein. Siehe dazu das Video unter Category: Arduino library experiments.
Möchte man mehrere Sensoren basteln, ist darauf zu achten, dass jeder eine eigene Kennung hat (diese wird in PhyphoxBLE::start("DistanceGyroAcceleration_01"); festgelegt). Anschließend kann über das Plus-Symbol in phyphox ein Bluetooth-Experiment hinzugefügt werden, das Experiment wird dann automatisch geladen.
#include <phyphoxBle.h>
#include <Wire.h>
#include <VL53L1X.h>
#include <Arduino_LSM9DS1.h>
float x ,y ,z, OffsetX, OffsetY, OffsetZ, Beschleunigung, az, OffsetS, Elong, Distance, ZentrifugalBeschl, wx, wy, wz, Drehrate;
VL53L1X sensor;
void setup()
{
PhyphoxBLE::start("DistanceGyroAcceleration"); //Start the BLE server
//Experiment
PhyphoxBleExperiment experiment;
experiment.setTitle("Abstand");
experiment.setCategory("Arduino Experiments");
experiment.setDescription("Abstand, Beschleunigung und Drehrate für Federschwinger, Luftkissenbahn und Drehschleuder");
//Views
PhyphoxBleExperiment::View view1;
view1.setLabel("az, s - Offset");
PhyphoxBleExperiment::View view2;
view2.setLabel("az, s");
PhyphoxBleExperiment::View view3;
view3.setLabel("Zentrifugal, Drehrate");
//Graph
PhyphoxBleExperiment::Graph graph1;
graph1.setLabel("Elongation");
graph1.setUnitX("s");
graph1.setUnitY("mm");
graph1.setLabelX("t");
graph1.setLabelY("s");
graph1.setChannel(0,1);
PhyphoxBleExperiment::Graph graph2;
graph2.setLabel("Beschleunigung");
graph2.setUnitX("s");
graph2.setUnitY("m/s2");
graph2.setLabelX("t");
graph2.setLabelY("a");
graph2.setChannel(0,2);
PhyphoxBleExperiment::Graph graph3;
graph3.setLabel("Abstand");
graph3.setUnitX("s");
graph3.setUnitY("mm");
graph3.setLabelX("t");
graph3.setLabelY("s");
graph3.setChannel(0,3);
PhyphoxBleExperiment::Graph graph4;
graph4.setLabel("Beschleunigung");
graph4.setUnitX("s");
graph4.setUnitY("m/s2");
graph4.setLabelX("t");
graph4.setLabelY("az");
graph4.setChannel(0,2);
PhyphoxBleExperiment::Graph graph5; //axy von omega_res
graph5.setLabel("Zentrifugalbeschleunigung");
graph5.setLabelX("axy");
graph5.setUnitX("1/s");
graph5.setUnitY("m/s2");
graph5.setLabelX("omega_xyz");
graph5.setLabelY("axy");
graph5.setStyle("dots");
graph5.setChannel(5, 4);
PhyphoxBleExperiment::Graph graph6;
graph6.setLabel("Res. Drehrate");
graph6.setLabelX("omega_xyz");
graph6.setUnitX("s");
graph6.setUnitY("1/s");
graph6.setLabelX("t");
graph6.setLabelY("omega_xyz");
graph6.setChannel(0, 5);
PhyphoxBleExperiment::Graph graph7; //axy von omega_res
graph7.setLabel("Zentrifugalbeschleunigung");
graph7.setLabelX("axy");
graph7.setUnitX("s");
graph7.setUnitY("m/s2");
graph7.setLabelX("t");
graph7.setLabelY("axy");
graph7.setChannel(0, 4);
experiment.addView(view1);
view1.addElement(graph1);
view1.addElement(graph2);
experiment.addView(view2);
view2.addElement(graph3);
view2.addElement(graph4);
experiment.addView(view3);
view3.addElement(graph5);
view3.addElement(graph6);
view3.addElement(graph7);
PhyphoxBLE::addExperiment(experiment); //Attach experiment to server
Wire.begin();
while (!sensor.init())
delay(100);
sensor.setTimeout(500);
sensor.setDistanceMode(VL53L1X::Short);
sensor.setMeasurementTimingBudget(20000);
sensor.startContinuous(20);
IMU.begin(); //Beschleunigungssensor starten
delay(250); //Nach dem der Knopf geedrückt wird, muss sich das Ding kurz beruhigen
// Offsetkorrektur Beschleunigung
for(int i=0;i<100;i++){
IMU.readAcceleration(x, y, z);
OffsetX += x;
OffsetY += y;
OffsetZ += z;
OffsetS += sensor.read();
delay(10);
}
OffsetX=OffsetX/100;
OffsetY=OffsetY/100;
OffsetZ=OffsetZ/100;
OffsetS=OffsetS/100;
Serial.begin(38400);//Falls man den Sensor an den PC anschließen möchte, für Abstandswerte
}
void loop()
{
Distance = sensor.read();
Elong = Distance - OffsetS;
IMU.readAcceleration(x, y, z);
Beschleunigung =-9.81*(z- OffsetZ);
ZentrifugalBeschl = 9.81 * sqrt(sq(x - OffsetX) + sq(y - OffsetY));
IMU.readGyroscope(wx, wy, wz);
Drehrate = 1.1148*6.28318530718*(sqrt(sq(wx) + sq(wy) + sq(wz))) / 360; //Kalibrierung Plattenspieler
PhyphoxBLE::write(Elong, Beschleunigung, Distance, ZentrifugalBeschl, Drehrate); //Send value to phyphox
Serial.println(Distance);//Abstandswerte an den PC senden
delay(10);
}
Alternative Programmierung
Die Geschwindigkeit kann als Differenzenquotient (zentrale differenzen) des Ortes gebildet werden. Das funktioniert gar nicht so schlecht. Hierfür werden die entsprechenden in Arrays gespeichert, aus denen dann aktuellen werte übertragen werden. Als Arraylänge wurde im Program einfach 5000 definiert, was hinreichend lang ist. Damit läuft es. Gute Programmierer haben sicherlich eine elegantere Lösung parat. Bitte korrigieren!
#include <phyphoxBle.h>
#include <Wire.h>
#include <VL53L1X.h>
#include <Arduino_LSM9DS1.h>
float x ,y ,z, OffsetX, OffsetY, OffsetZ, az, OffsetS, Elong, Distance, ZentrifugalBeschl, wx, wy, wz, Drehrate;
float t[5000];
float Beschleunigung[5000];
float distance[5000];
float velocity[5000];
VL53L1X sensor;
void setup()
{
PhyphoxBLE::start("DistanceGyroAcceleration"); //Start the BLE server
//Experiment
PhyphoxBleExperiment experiment;
experiment.setTitle("Abstand");
experiment.setCategory("Arduino Experiments");
experiment.setDescription("Abstand, Beschleunigung, Geschwindigkeit und Drehrate für Federschwinger, Luftkissenbahn und Drehschleuder");
//Views
PhyphoxBleExperiment::View view1;
view1.setLabel("s, a");
PhyphoxBleExperiment::View view2;
view2.setLabel("s, v, az");
PhyphoxBleExperiment::View view3;
view3.setLabel("Zentrifugal, Drehrate");
//Graph
PhyphoxBleExperiment::Graph graph1;
graph1.setLabel("Auslenkung");
graph1.setUnitX("s");
graph1.setUnitY("mm");
graph1.setLabelX("t");
graph1.setLabelY("s");
graph1.setStyle("dots");
graph1.setChannel(0,1);
PhyphoxBleExperiment::Graph graph2;
graph2.setLabel("Beschleunigung");
graph2.setUnitX("s");
graph2.setUnitY("m/s2");
graph2.setLabelX("t");
graph2.setLabelY("a");
graph2.setStyle("dots");
graph2.setChannel(0,2);
PhyphoxBleExperiment::Graph graph3;
graph3.setLabel("Geschwindigkeit");
graph3.setUnitX("s");
graph3.setUnitY("m/s");
graph3.setLabelX("t");
graph3.setLabelY("v");
graph3.setStyle("dots");
graph3.setChannel(0,3);
PhyphoxBleExperiment::Graph graph4;
graph4.setLabel("Phasendiagramm");
graph4.setUnitX("mm");
graph4.setUnitY("m/s2");
graph4.setLabelX("s");
graph4.setLabelY("v");
graph4.setStyle("dots");
graph4.setChannel(1,3);
PhyphoxBleExperiment::Graph graph5; //axy von omega_res
graph5.setLabel("Zentrifugalbeschleunigung");
graph5.setLabelX("axy");
graph5.setUnitX("1/s");
graph5.setUnitY("m/s2");
graph5.setLabelX("omega_xyz");
graph5.setLabelY("axy");
graph5.setStyle("dots");
graph5.setChannel(5, 4);
PhyphoxBleExperiment::Graph graph6;
graph6.setLabel("Res. Drehrate");
graph6.setLabelX("omega_xyz");
graph6.setUnitX("s");
graph6.setUnitY("1/s");
graph6.setLabelX("t");
graph6.setLabelY("omega_xyz");
graph6.setChannel(0, 5);
PhyphoxBleExperiment::Graph graph7; //axy von omega_res
graph7.setLabel("Zentrifugalbeschleunigung");
graph7.setLabelX("axy");
graph7.setUnitX("s");
graph7.setUnitY("m/s2");
graph7.setLabelX("t");
graph7.setLabelY("axy");
graph7.setChannel(0, 4);
experiment.addView(view1);
view1.addElement(graph1);
view1.addElement(graph2);
experiment.addView(view2);
view2.addElement(graph1);
view2.addElement(graph3);
view2.addElement(graph2);
experiment.addView(view3);
view3.addElement(graph5);
view3.addElement(graph6);
view3.addElement(graph7);
PhyphoxBLE::addExperiment(experiment); //Attach experiment to server
Wire.begin();
while (!sensor.init())
delay(100);
sensor.setTimeout(500);
sensor.setDistanceMode(VL53L1X::Short);
sensor.setMeasurementTimingBudget(20000);
sensor.startContinuous(20);
IMU.begin(); //Beschleunigungssensor starten
delay(250); //Nach dem der Knopf geedrückt wird, muss sich das Ding kurz beruhigen
// Offsetkorrektur Beschleunigung
for(int i=0;i<100;i++){
IMU.readAcceleration(x, y, z);
OffsetX += x;
OffsetY += y;
OffsetZ += z;
OffsetS += sensor.read();
delay(10);
}
OffsetX=OffsetX/100;
OffsetY=OffsetY/100;
OffsetZ=OffsetZ/100;
OffsetS=OffsetS/100;
Serial.begin(38400);//Falls man den Sensor an den PC anschließen möchte, für Abstandswerte
}
void loop()
{
for (int i = 0; i<5000; i = i + 1) {
IMU.readAcceleration(x, y, z);
Beschleunigung[i] = -9.81*(z - OffsetZ);
ZentrifugalBeschl = 9.81 * sqrt(sq(x - OffsetX) + sq(y - OffsetY));
Distance = sensor.read() - OffsetS;
distance[i] = Distance;
IMU.readGyroscope(wx, wy, wz);
Drehrate = 1.1148*6.28318530718*(sqrt(sq(wx) + sq(wy) + sq(wz))) / 360; //Kalibrierung Plattenspieler
t[i] = millis();
if(i > 2) {
velocity[i-1] = ((distance[i] - distance[i-2]) / (t[i] - t[i-2]));
PhyphoxBLE::write(distance[i-1], Beschleunigung[i-1], velocity[i-1], ZentrifugalBeschl, Drehrate);
Serial.println(Distance);//Abstandswerte an den PC senden
delay(1);
}
}
}