Difference between revisions of "Luftkissenbahn und Federpendel"
| Line 1: | Line 1: | ||
{{Infobox Experiment | {{Infobox Experiment | ||
| − | | Name = | + | | Name = Luftkissenbahn und Federpendel |
| Category = Arduino library experiments | | Category = Arduino library experiments | ||
| Sensors = MPU-6050 | | Sensors = MPU-6050 | ||
}} | }} | ||
| − | + | Sowohl beim Federpendel als auch bei Versuchen auf der Luftkissenbahn, wo man Beschleunigung und Abstand messen möchte, bietet sich eine Kombination aus Abstand- und Beschleunigungssensor an. Der Arduino Nano 33 BLE verfügt über einen eingebauten Beschleunigungssensor. Über den I2C-Bus lässt sich ein Time-of-Flight-Sensor anschließen, siehe (https://phyphox.org/wiki/index.php/Distanzsensor_(Federpendel)). | |
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
<gallery widths=500px heights=400px> | <gallery widths=500px heights=400px> | ||
Revision as of 20:30, 16 November 2023
| Experiment | Luftkissenbahn und Federpendel |
|---|---|
| Category | Arduino library experiments |
| Used sensors | MPU-6050 |
Sowohl beim Federpendel als auch bei Versuchen auf der Luftkissenbahn, wo man Beschleunigung und Abstand messen möchte, bietet sich eine Kombination aus Abstand- und Beschleunigungssensor an. Der Arduino Nano 33 BLE verfügt über einen eingebauten Beschleunigungssensor. Über den I2C-Bus lässt sich ein Time-of-Flight-Sensor anschließen, siehe (https://phyphox.org/wiki/index.php/Distanzsensor_(Federpendel)).
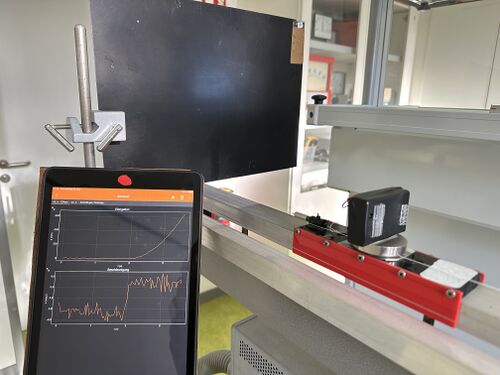
Beschleunigungs- und Abstandsmessung auf Luftkissenbahn

Arduino Nano 33 BLE mit ToF-Sensor


Aufbau
Die Verkabelung des Sensors ist wieder wie üblich: 3V3 – Vin, Gnd – Gnd, SCL – 22, SDA –21. Als Stromversorgung dient hier einfach eine kleine Powerbank, auf die der ESP32 mit Doppelseitigem Klebeband befestigt wird. Der MPU-6050 wurde mit etwas Heißkleber auf den ESP32 neben das Kommunikationsmodul geklebt und am Ende alles mit Schrumpfschlauch versiegelt.
Programmierung
Der ESP32 wird über die Arduino IDE programmiert. Es müssen die Definitionen für den ESP32 und die phyphox-Bibliothek installiert sein. Siehe dazu das Video unter Category: Arduino library experiments.
Es ist darauf zu achten, dass jeder ESP32 eine eigene Kennung hat (diese wird in PhyphoxBLE::start("Thermometer_01") festgelegt). Anschließend kann über das Plus-Symbol in phyphox ein Bluetooth-Experiment hinzugefügt werden, das Experiment wird dann automatisch geladen.